
Alors j'en suis pas au contrôleur du servo de l'amorto avant gauche, mais au contrôleur du pilote auto
Sinon, j'ai pas mal avancé, et voilà ce qui est FAIT:
-nouveau panel MCDU
-Révision des SID/STAR/APP
-API
-ALTN
-CO-RTE
Ce qui reste à faire avant de lancer une nouvelle béta:
-Nouveau module AP + FBW
Ce nouveau module se présentera sous la forme d'un énième logiciel, car le server FMGS n'arrive plus à suivre niveau performance (il se tape tous les calculs de routes du FPLN, les HDG à suivre etc....). Du coup cette modularité devrait permettre à terme de mettre le server sur un pc à part de FS, le module AP/FBW sur le PC FS (pour sauver la vitesse de réaction des gouvernes), et chaque gauges où bon vous semble. Faudra pousser les tests d'utilisation réseau plus tard.
Je shunte complètement l' AP de FS (sauf pour l'ATHR), ce qui impose un gros travail de réécriture (avant je l'utilisais pour la capture et le maintient de l'altitude).
Pour l'instant, le contrôle latéral est pas trop mal en suivi de route. J'ai réussi à suivre un ILS CAT 1 sans vent jusqu'à 200ft sans trop de déviation par rapport au LOC et au GP. Les modes OP DES/OP CLB/CLB fonctionnent correctement. Il faut que je règle le mode DES seul (avec suivi de VDEV). La capture d'altitude présente encore trop d'oscillations à mon goût, et le maintient d'altitude perd une centaine de pieds en virages, ce qui est trop selon mes standards (j'aimerais arriver à moins de 20ft perdus).
Donc "plus" qu'à régler l'altitude et ce sera prêt pour une nouvelle bêta!! Je laisse volontairement de côté le SD et l'EWD sur cette version, sinon ça prendrait trop de temps, et ce n'est pas critique en termes de "volabilité".
En guise de friandise:
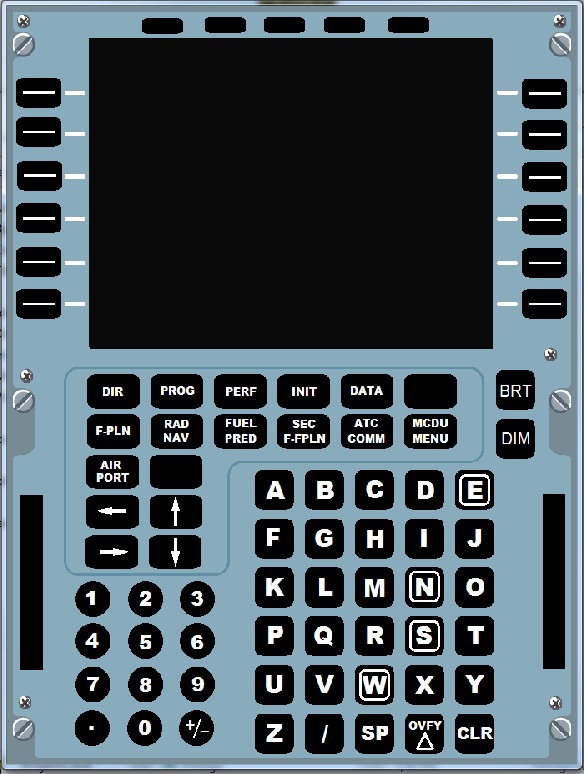
A savoir qu'il est entièrement redimensionnable, le rapport hauteur/largeur est compatible 800*600 pour les touchscreens, et il est possible de jouer sur la luminosité avec les boutons DIM et BRT


 , je viens de finaliser une version plus que volable du pilote automatique.
, je viens de finaliser une version plus que volable du pilote automatique. ). Sans le AP/FBW, ça marche moins bien la PA ...
). Sans le AP/FBW, ça marche moins bien la PA ... 