Merci pour les photos David,
Quelle usinage à gaz ! je l'avais vu au Bourget aussi et essayé de négocier un "emprunt" pour les bonnes œuvres... en vain.
Nicolas

JOYSTICK A320
Re: JOYSTICK A320
![]() de AJBretagne » Lun 14 Jan 2013 13:51
de AJBretagne » Lun 14 Jan 2013 13:51
-

AJBretagne - Messages: 328
- Inscription: 21/09/09
- Localisation: Concarneau
Re: JOYSTICK A320
![]() de A320 hérétique » Lun 14 Jan 2013 16:45
de A320 hérétique » Lun 14 Jan 2013 16:45
Voilà, le mystère du mécanisme de blocage est élucidé, et en même temps celui du cardan réel (images extraites de http://canadajones.free.fr/Commandes%20de%20vol.pdf).
Le mécanisme de blocage ; une seule came (zoom A), actionnée par l'encoche ménagée dans le champ du cylindre horizontal intérieur de carcan, qui tourne autour des axes pitch et roll (voir image suivante) : la came est soit directement poussée par le cylindre qui bascule (pitch), soit poussée par le flan incliné de l'encoche lorsque le cylindre tourne autour de son axe de révolution (roll).

Le cardan : astucieux, n'est-ce pas, mais hélas à peu près hors de notre portée ; et c'est sa conception qui permet de bloquer avec une seule came ...

Cordialement, Michel
Le mécanisme de blocage ; une seule came (zoom A), actionnée par l'encoche ménagée dans le champ du cylindre horizontal intérieur de carcan, qui tourne autour des axes pitch et roll (voir image suivante) : la came est soit directement poussée par le cylindre qui bascule (pitch), soit poussée par le flan incliné de l'encoche lorsque le cylindre tourne autour de son axe de révolution (roll).
Le cardan : astucieux, n'est-ce pas, mais hélas à peu près hors de notre portée ; et c'est sa conception qui permet de bloquer avec une seule came ...
Cordialement, Michel
http://www.myA320sim.com
Simu mixte P3D/FS2020, serveur P3Dv4/A320 FMGS (7700k et GTX 1070 sous W10 64), client P3Dv4/FS2020 (i9-12900K et RTX 4070 Ti Super sous W10 64), 3 vdp Optoma GT1080E, client A320 FMGS (2600k sous W10 64).
Simu mixte P3D/FS2020, serveur P3Dv4/A320 FMGS (7700k et GTX 1070 sous W10 64), client P3Dv4/FS2020 (i9-12900K et RTX 4070 Ti Super sous W10 64), 3 vdp Optoma GT1080E, client A320 FMGS (2600k sous W10 64).
-

A320 hérétique - Messages: 3533
- Inscription: 2/09/12
- Localisation: Pornic
Re: JOYSTICK A320
![]() de AJBretagne » Mer 16 Jan 2013 20:02
de AJBretagne » Mer 16 Jan 2013 20:02
Hello,
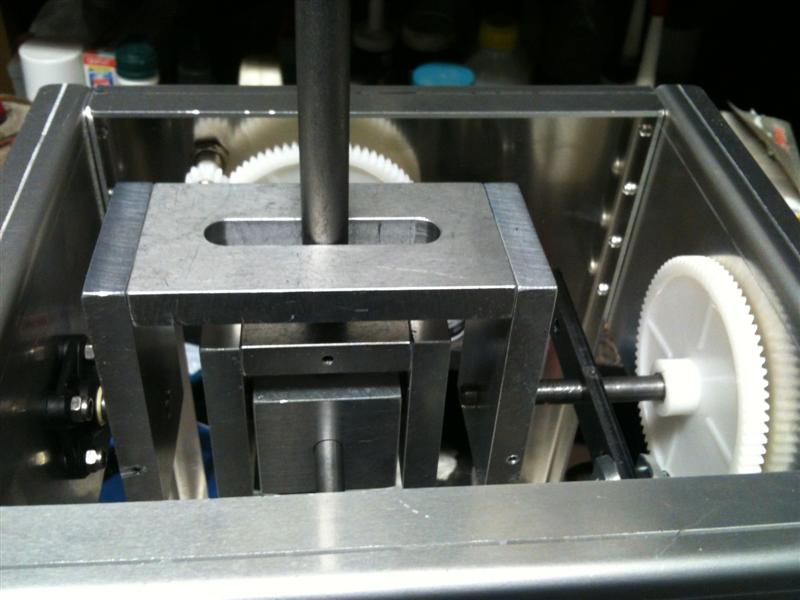
Bien loin des truc compliqués ci-dessus... voilà les avancées du jour.
Il reste encore plein de place, j'aurais du faire plus petit...
Un petite modification cependant : je vais rajouter un palier intermédiaire pour éviter l’arc-boutement sur l'axe le plus long et remplacer les rivets sur un côté de la boîte par des vis. (montage moins casse-tête.)


Nicolas
Bien loin des truc compliqués ci-dessus... voilà les avancées du jour.
Il reste encore plein de place, j'aurais du faire plus petit...
Un petite modification cependant : je vais rajouter un palier intermédiaire pour éviter l’arc-boutement sur l'axe le plus long et remplacer les rivets sur un côté de la boîte par des vis. (montage moins casse-tête.)
Nicolas
-
AJBretagne - Messages: 328
- Inscription: 21/09/09
- Localisation: Concarneau
Re: JOYSTICK A320
![]() de A320 hérétique » Mer 16 Jan 2013 22:42
de A320 hérétique » Mer 16 Jan 2013 22:42
Nicolas, tes 2 points sont très précisément ce qui me chagrinait un peu (pourquoi pas carrément un 3ème palier sur les 2 axes ?) ; pourquoi ne pas envisager non plus une encoche au dessus de chaque palier qui permettrait d'amener les axes et tout leur équipement par le haut, ça te simplifierait considérablement le montage et surtout la maintenance.
Ton cardan est magnifique !
Si tu redimensionnes tout, penses tout de suite également à pouvoir intégrer les dispos á effet hall en bout d'axe : ça permet de se passer des engrenages (débattement +_20 degrés, c'est parfait), les essais que nous avons fait avec Renaud montrent que cette solution est très simple de mise en oeuvre.
Mais au fait, qu'est- ce que ça donne ???
Michel
Ton cardan est magnifique !
Si tu redimensionnes tout, penses tout de suite également à pouvoir intégrer les dispos á effet hall en bout d'axe : ça permet de se passer des engrenages (débattement +_20 degrés, c'est parfait), les essais que nous avons fait avec Renaud montrent que cette solution est très simple de mise en oeuvre.
Mais au fait, qu'est- ce que ça donne ???
Michel
http://www.myA320sim.com
Simu mixte P3D/FS2020, serveur P3Dv4/A320 FMGS (7700k et GTX 1070 sous W10 64), client P3Dv4/FS2020 (i9-12900K et RTX 4070 Ti Super sous W10 64), 3 vdp Optoma GT1080E, client A320 FMGS (2600k sous W10 64).
Simu mixte P3D/FS2020, serveur P3Dv4/A320 FMGS (7700k et GTX 1070 sous W10 64), client P3Dv4/FS2020 (i9-12900K et RTX 4070 Ti Super sous W10 64), 3 vdp Optoma GT1080E, client A320 FMGS (2600k sous W10 64).
-
A320 hérétique - Messages: 3533
- Inscription: 2/09/12
- Localisation: Pornic
Re: JOYSTICK A320
![]() de AJBretagne » Jeu 17 Jan 2013 08:57
de AJBretagne » Jeu 17 Jan 2013 08:57
Michel,
la portée sur l'axe court ne justifie pas un troisième palier. (montage asymétrique pitch/roll)
Je redimensionnerai la boîte pour la manette de gauche si celle-ci (droite) est validée. J'essayerai peut-être des découpes comme tu le préconises mais en gardant à l'esprit que cela fragilisera la structure de la boite... Je pense que je préfère enlever 6 vis. et puis en matière de maintenance, je ne vois pas trop ce qu'il peut y avoir de si fréquent que cela justifierait de se focaliser dessus.
Pour les capteurs hall, tout est possible ! je ne me rends pas compte des contraintes mais pourquoi pas ?
Nicolas
ps : il me manque une chape pour le ressort => l'ensemble n'est pas encore testé....
la portée sur l'axe court ne justifie pas un troisième palier. (montage asymétrique pitch/roll)
Je redimensionnerai la boîte pour la manette de gauche si celle-ci (droite) est validée. J'essayerai peut-être des découpes comme tu le préconises mais en gardant à l'esprit que cela fragilisera la structure de la boite... Je pense que je préfère enlever 6 vis. et puis en matière de maintenance, je ne vois pas trop ce qu'il peut y avoir de si fréquent que cela justifierait de se focaliser dessus.
Pour les capteurs hall, tout est possible ! je ne me rends pas compte des contraintes mais pourquoi pas ?
Nicolas
ps : il me manque une chape pour le ressort => l'ensemble n'est pas encore testé....
-
AJBretagne - Messages: 328
- Inscription: 21/09/09
- Localisation: Concarneau
Re: JOYSTICK A320
![]() de fcoq » Jeu 17 Jan 2013 21:10
de fcoq » Jeu 17 Jan 2013 21:10
Continuez les gars vous touchez au but

Franck
Franck
Cockpit A320
Hardware https://www.homecockpits.fr/
https://www.facebook.com/homecockpitsfr ... kkpitsfr.1
Chaine youtube: https://www.youtube.com/channel/UCXdq4p ... rEfCU-OQWQ
Hardware https://www.homecockpits.fr/
https://www.facebook.com/homecockpitsfr ... kkpitsfr.1
Chaine youtube: https://www.youtube.com/channel/UCXdq4p ... rEfCU-OQWQ
-

fcoq - Messages: 3340
- Inscription: 19/05/10
- Localisation: Eure et Loire
Re: JOYSTICK A320
![]() de A320 hérétique » Sam 19 Jan 2013 23:16
de A320 hérétique » Sam 19 Jan 2013 23:16
Bonsoir Nicolas,
Je vois que tu as tout goupillé ; le démontage est-il facilement envisageable ? Une fois, plusieurs fois ? J'aime bien pouvoir démonter pour pouvoir améliorer ...
Sinon, pour les capteurs hall, vois la vidéo de Renaud, nous avons refait des essais, c'est parfait pour nous : avec un débattement de plus ou moins 20 degrés on balaie l'intégralité des valeurs électriques du capteur. Il faut fixer un petit cube aimanté en bout d'axe (8x8x8), et placer en face dans l'axe, á proximité (1 mm), le capteur ( qques mm, toujours dans l'axe) ; la position du capteur en x, y, z est importante, dans un premier temps ce serait bien que ce soit réglable ; je vais tacher de faire un premier proto.
Je suis en train de terminer l'intégration du joystick dans le simu, ainsi que la réal du tiller, photos cette semaine.
Michel
Je vois que tu as tout goupillé ; le démontage est-il facilement envisageable ? Une fois, plusieurs fois ? J'aime bien pouvoir démonter pour pouvoir améliorer ...
Sinon, pour les capteurs hall, vois la vidéo de Renaud, nous avons refait des essais, c'est parfait pour nous : avec un débattement de plus ou moins 20 degrés on balaie l'intégralité des valeurs électriques du capteur. Il faut fixer un petit cube aimanté en bout d'axe (8x8x8), et placer en face dans l'axe, á proximité (1 mm), le capteur ( qques mm, toujours dans l'axe) ; la position du capteur en x, y, z est importante, dans un premier temps ce serait bien que ce soit réglable ; je vais tacher de faire un premier proto.
Je suis en train de terminer l'intégration du joystick dans le simu, ainsi que la réal du tiller, photos cette semaine.
Michel
http://www.myA320sim.com
Simu mixte P3D/FS2020, serveur P3Dv4/A320 FMGS (7700k et GTX 1070 sous W10 64), client P3Dv4/FS2020 (i9-12900K et RTX 4070 Ti Super sous W10 64), 3 vdp Optoma GT1080E, client A320 FMGS (2600k sous W10 64).
Simu mixte P3D/FS2020, serveur P3Dv4/A320 FMGS (7700k et GTX 1070 sous W10 64), client P3Dv4/FS2020 (i9-12900K et RTX 4070 Ti Super sous W10 64), 3 vdp Optoma GT1080E, client A320 FMGS (2600k sous W10 64).
-
A320 hérétique - Messages: 3533
- Inscription: 2/09/12
- Localisation: Pornic
Re: JOYSTICK A320
![]() de martias » Dim 20 Jan 2013 18:02
de martias » Dim 20 Jan 2013 18:02
je viens de mettre sur mon site des produits en vente dont 2 joysticks pro, ils sont assez dure, si ca interresse l'un d'entre vous, il y a des vis, donc on peux desolidariser le manche et en mettre un autre plus typé A320
www.dmartias.fr
www.dmartias.fr
remont a écrit:La remarque/reproche num1 fait par les pilotes 320 qui utilisent le simu, c'est la molesse du Joystick. Il s'agit essentiellement de rendre le manche plus dur à manœuvrer. Ce n'est pas réalisable sur les Saiteks.
Didier Martias
http://www.dmartias.fr
http://www.dmartias.fr
- martias
- Messages: 17
- Inscription: 22/08/10
Re: JOYSTICK A320
![]() de AJBretagne » Dim 20 Jan 2013 19:24
de AJBretagne » Dim 20 Jan 2013 19:24
Michel,
Je te confirme qu'avec un chasse goupille, tu démontes et remontes à volonté.
J'en parle en connaissance de cause j'ai du démonter une des pièces 3 fois aujourd'hui... Pas les yeux en face des trous...
Je monte tout dans le simu cette semaine. On récupère l'électronique du joystick pour passer tout ça en usb et voilà.
Nicolas
Je te confirme qu'avec un chasse goupille, tu démontes et remontes à volonté.
J'en parle en connaissance de cause j'ai du démonter une des pièces 3 fois aujourd'hui... Pas les yeux en face des trous...
Je monte tout dans le simu cette semaine. On récupère l'électronique du joystick pour passer tout ça en usb et voilà.
Nicolas
-
AJBretagne - Messages: 328
- Inscription: 21/09/09
- Localisation: Concarneau
Re: JOYSTICK A320
![]() de A320 hérétique » Lun 21 Jan 2013 18:35
de A320 hérétique » Lun 21 Jan 2013 18:35
Bonjour,
voilà la première étape à peu près terminée, joystick opérationnel et tiller, car en abandonnant mon ancien joystick j'ai perdu le 3ème axe qui me servait pour diriger au sol :
- le joystick :
Pour l'instant je conserve le manche de mon ancien joystick avec ses boutons, le chapeau chinois en particulier est bien pratique ; la fixation du manche sur le cardan est un peu délicate, j'ai d'ailleurs finalement commis une erreur d'environ 5° dans son positionnement angulaire ... je changerai ça quand j'aurai trouvé la motivation ...
Le soufflet viens de AST.
Les ressorts respectent le cahier des charges, et les dampers sont réglés au minimum de résistance (vitesse max).
Les potentiomètres et les divers switchs sont gérés par une carte USBaxes (OC), qui prend également en compte le tiller.

- le tiller :
Pas très compliqué, il est monté sur 2 roulements à bille, ressort en corde à piano ; le point délicat a été la poignée, scultée dans du mdf préparé à la CNC, avec renfort interne, et de grandes scéances de ponçage ; je crois qu'il faut que j'y rajoute une plaque décorative circulaire, mais je ne sais pas trop, les images sur le net sont assez variables sur ce point : je suis preneur de précisions !

- le tout en situation (dans une implantation aussi hérétique que le reste !) :
Les sensations sont vraiment très agréables, compte tenu des forces en jeu on ne peux en juger que joystick définitivement fixé ; retour au neutre OK. J'attends quand même la validation définitive du "pilote d'essai", mais je suis très confiant.

Etape suivant : remplacement des potentiomètres par des capteurs à effet hall, mais je crains en fait de devoir refaire complètement le proto tellement les cotes sont limites ...
Michel
voilà la première étape à peu près terminée, joystick opérationnel et tiller, car en abandonnant mon ancien joystick j'ai perdu le 3ème axe qui me servait pour diriger au sol :
- le joystick :
Pour l'instant je conserve le manche de mon ancien joystick avec ses boutons, le chapeau chinois en particulier est bien pratique ; la fixation du manche sur le cardan est un peu délicate, j'ai d'ailleurs finalement commis une erreur d'environ 5° dans son positionnement angulaire ... je changerai ça quand j'aurai trouvé la motivation ...
Le soufflet viens de AST.
Les ressorts respectent le cahier des charges, et les dampers sont réglés au minimum de résistance (vitesse max).
Les potentiomètres et les divers switchs sont gérés par une carte USBaxes (OC), qui prend également en compte le tiller.
- le tiller :
Pas très compliqué, il est monté sur 2 roulements à bille, ressort en corde à piano ; le point délicat a été la poignée, scultée dans du mdf préparé à la CNC, avec renfort interne, et de grandes scéances de ponçage ; je crois qu'il faut que j'y rajoute une plaque décorative circulaire, mais je ne sais pas trop, les images sur le net sont assez variables sur ce point : je suis preneur de précisions !
- le tout en situation (dans une implantation aussi hérétique que le reste !) :
Les sensations sont vraiment très agréables, compte tenu des forces en jeu on ne peux en juger que joystick définitivement fixé ; retour au neutre OK. J'attends quand même la validation définitive du "pilote d'essai", mais je suis très confiant.
Etape suivant : remplacement des potentiomètres par des capteurs à effet hall, mais je crains en fait de devoir refaire complètement le proto tellement les cotes sont limites ...
Michel
http://www.myA320sim.com
Simu mixte P3D/FS2020, serveur P3Dv4/A320 FMGS (7700k et GTX 1070 sous W10 64), client P3Dv4/FS2020 (i9-12900K et RTX 4070 Ti Super sous W10 64), 3 vdp Optoma GT1080E, client A320 FMGS (2600k sous W10 64).
Simu mixte P3D/FS2020, serveur P3Dv4/A320 FMGS (7700k et GTX 1070 sous W10 64), client P3Dv4/FS2020 (i9-12900K et RTX 4070 Ti Super sous W10 64), 3 vdp Optoma GT1080E, client A320 FMGS (2600k sous W10 64).
-
A320 hérétique - Messages: 3533
- Inscription: 2/09/12
- Localisation: Pornic
Retourner vers Hardware divers
Qui est en ligne
Utilisateurs parcourant ce forum: Aucun utilisateur enregistré et 11 invités