Me revoilà
Dans ma dernière présentation, je vous ai présenté toutes (ou presque) les étapes de la construction d’un VOR.
Aujourd’hui je vous présente la version finie.
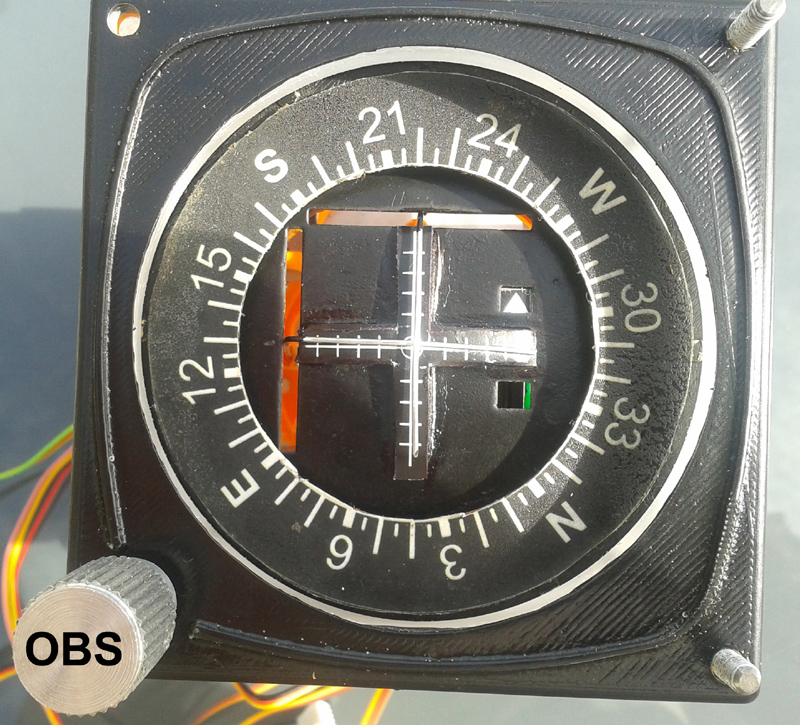
Pas toujours facile de passer de la théorie à la pratique.
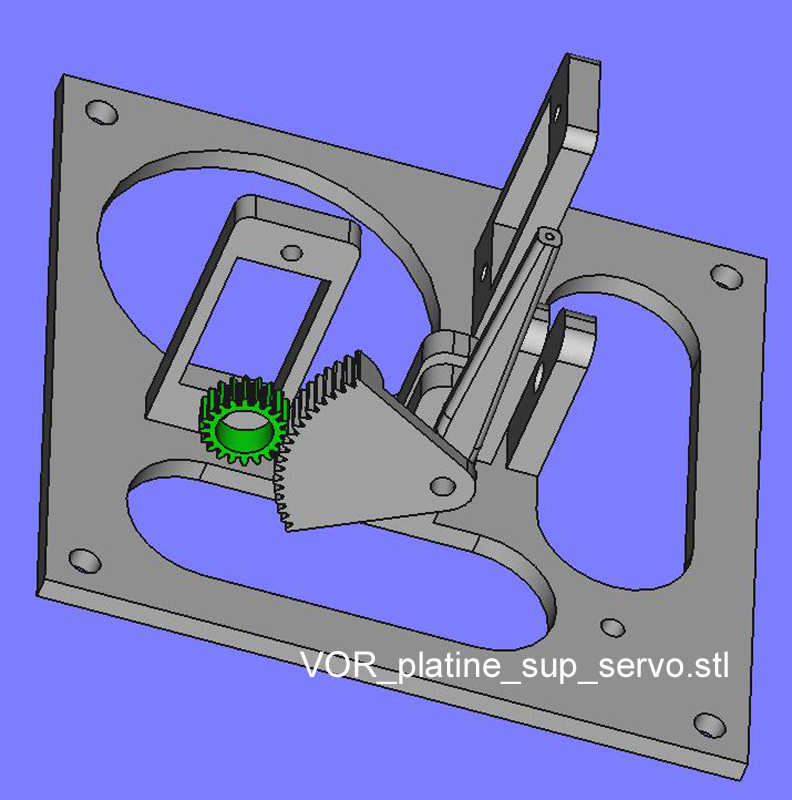
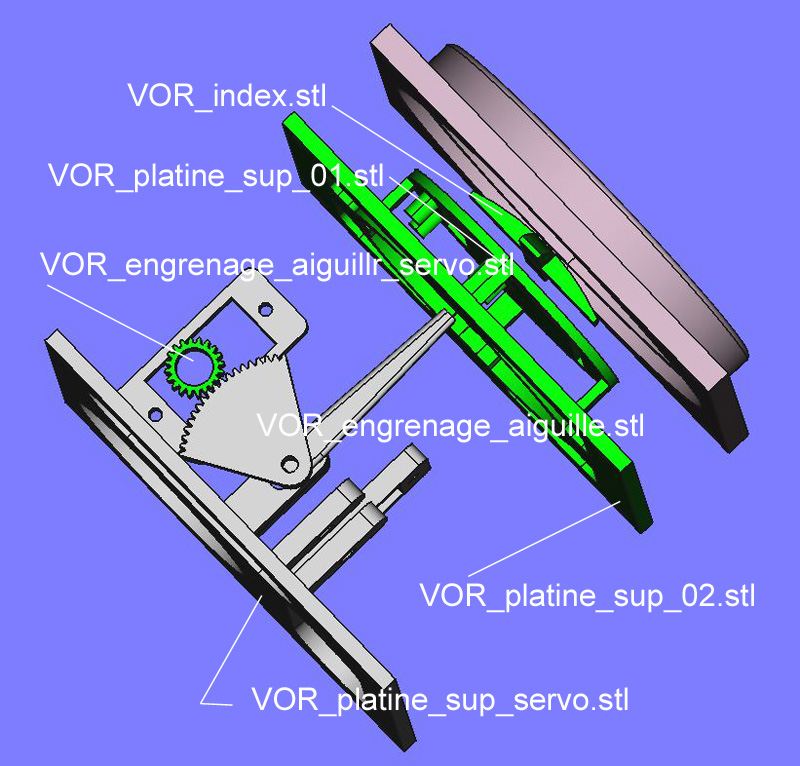
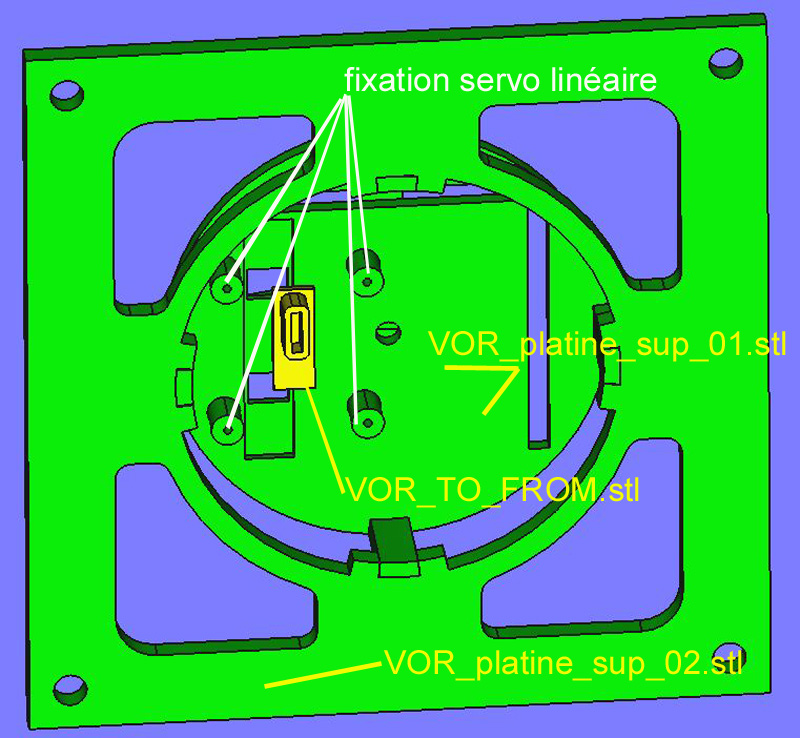
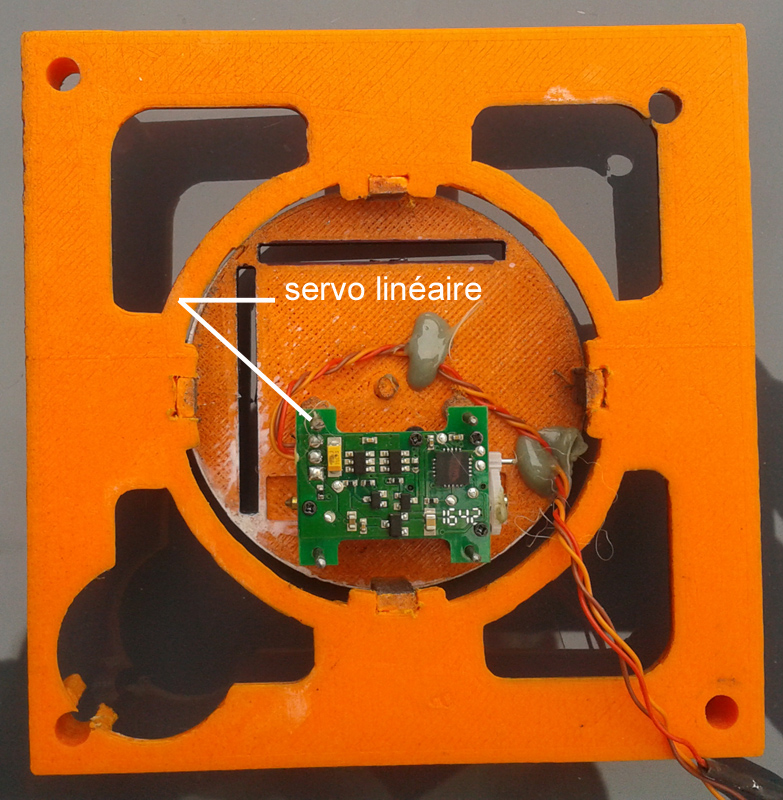
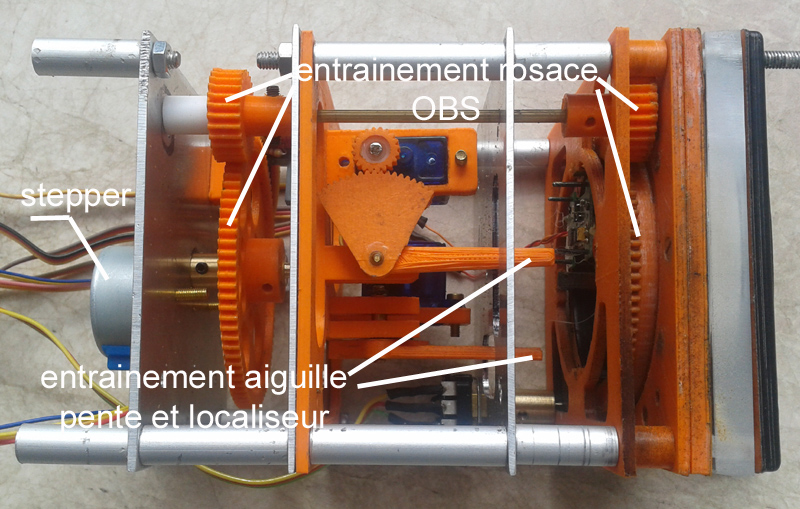
D’abord la position du servo linéaire pour le positionnement des index TO FROM
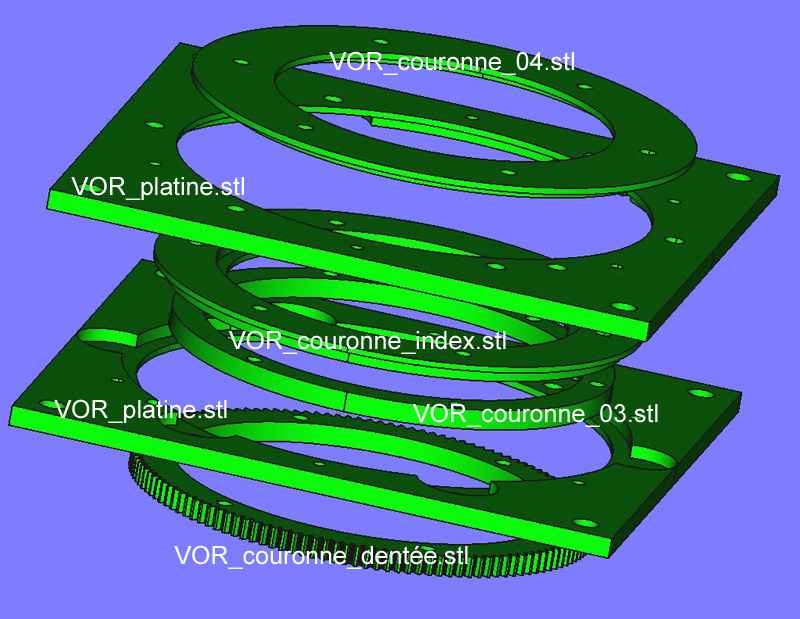
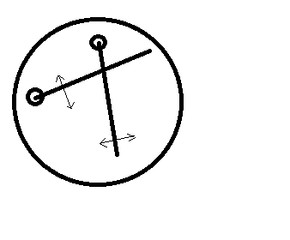
La partie la plus délicate à mettre en place fut l’entrainement de la rosace OBS
Les engrenages imprimés en 3D n’ont pas une très grande précision.
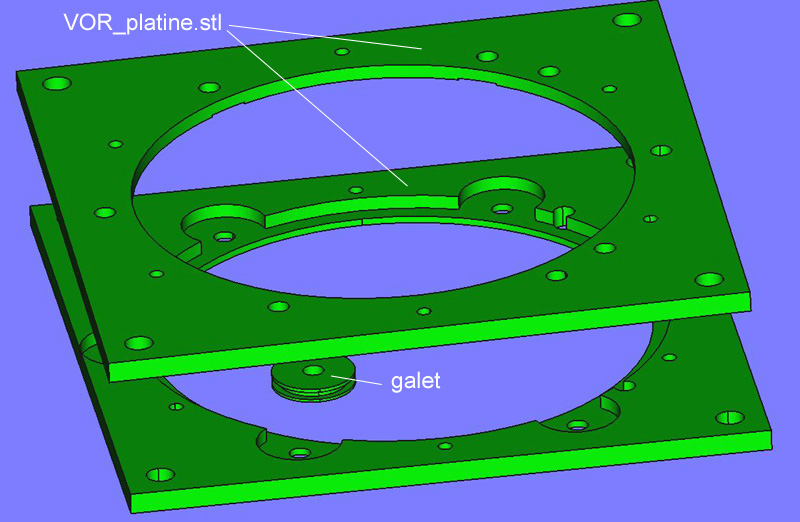
Dans mon cas, il y avait un peu d’ovalisation, donc un entrainement trop serré par moment. Pour compenser ces défauts, j’ai joué sur les pourcentages d’impression sur les axes X Y Z, comme vous pouvez le voir sur l’image ci-dessous.
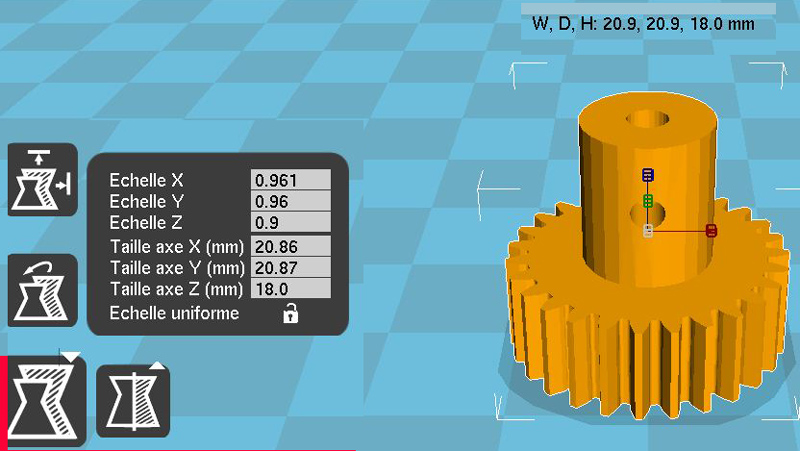
Cette manipulation a très peu d’effet sur le module de la roue dentée, mais diminue son diamètre, ce qui a eu pour effet d’avoir un entrainement plus fluide.
Elle a aussi l'avantage de garder le nombre de dents, donc de ne pas changer le rapport de transmission.
J’avoue que cette méthode fut très empirique, c’est après maints essais que j’ai obtenu satisfaction.
Ci-joint les fichiers STL et la sérigraphie.
VOR_03.rar
Et pour finir le code sioc pour un bon fonctionnement du VOR, je l’ai testé, il marche, il peut être amélioré. Par contre je n’ai pas intégré le code pour le fonctionnement de l’encodeur pour le positionnement de l’OBS.
- Code: Tout sélectionner
// *****************************************************************************
// * Config_SIOC ver 5.1 - By Manuel Velez - www.opencockpits.com
// *****************************************************************************
// * FileName : essai_vor.txt
// * Date : 09/08/2019
Var 0001, name A12
Var 0002, name A13
Var 0003, name A14
Var 0004, name A15
Var 0006, name aiguille_loc
Var 0007, name aiguille_pente
Var 0008, name aiguille_to
Var 0009, name servo_loc, Link USB_SERVOS, Device 4, Output 1, PosL 460, PosC 621, PosR 778
Var 0010, name servo_pente, Link USB_SERVOS, Device 4, Output 4, PosL 360, PosC 635, PosR 915
Var 0011, name servo_tofrom, Link USB_SERVOS, Device 4, Output 3, PosL 370, PosC 565, PosR 830
Var 0012, name moteur_OBS, Link USB_STEPPER, Output 1, PosL 3, PosC 0, PosR 4, Type H
Var 0013, name vor_localiser, Link FSUIPC_INOUT, Offset $0C48, Length 1 // NAV1
{
IF &vor_localiser > 127
{
&aiguille_loc = &vor_localiser - 257 // correction suite erreur fsuipc
}
ELSE
{
&aiguille_loc = &vor_localiser
}
&A12 = &aiguille_loc * 2.1
&A12 = &A12 + 310
&A12 = 950 - &A12
&A12 = LIMIT 370 ,910 ,0
&servo_loc = &A12
}
Var 0014, name vor_pente, Link FSUIPC_INOUT, Offset $0C49, Length 1 // NAV1
{
IF &vor_pente < 120
{
&aiguille_pente = &vor_pente + 255 // correction suite erreur fsuipc
}
ELSE
{
&aiguille_pente = &vor_pente
}
&A13 = &aiguille_pente * 2.4
&A13 = &A13 + 200
&servo_pente = &A13
}
Var 0015, name vor_tofrom, Link FSUIPC_INOUT, Offset $0C4B, Length 2 // NAV 1
{
IF &vor_tofrom = 0
{
&aiguille_to = 586
}
IF &vor_tofrom = 1
{
&aiguille_to = 846
}
IF &vor_tofrom = 2
{
&aiguille_to = 714
}
&servo_tofrom = &aiguille_to
}
Var 0016, name vor_OBS, Link FSUIPC_INOUT, Offset $0C4E, Length 2
{
L0 = &vor_OBS * 100
&moteur_OBS = 36000 - L0
}
C'est fini, pour l'instant, avec toutes les jauges.
Il me reste à plancher sur tout le reste: interrupteur, manette de train, volets, manche, ...
et plein d'autres choses encore.
Je vous dit donc à bientôt avec de nouveau éléments.
Soyez patients.
Jean-Gilles

 Jean-Gilles
Jean-Gilles