gyro et HDG
Bonjour à tous,
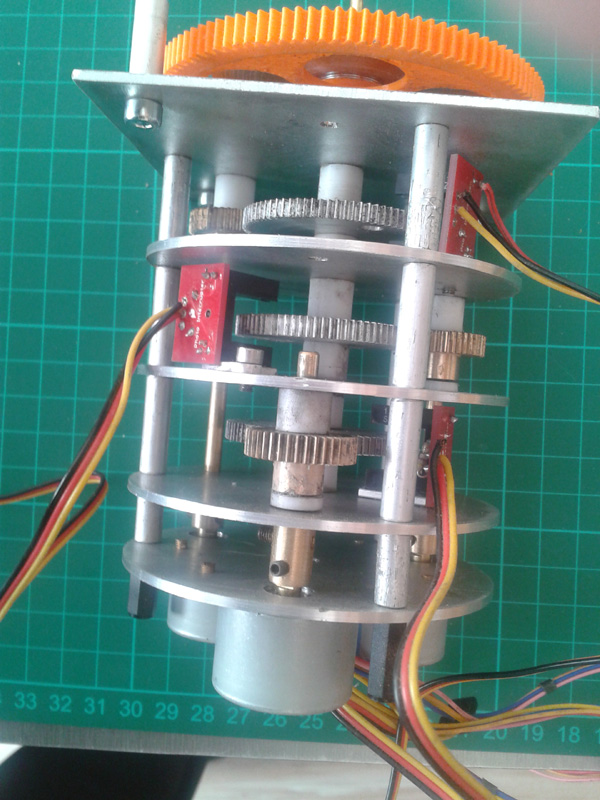
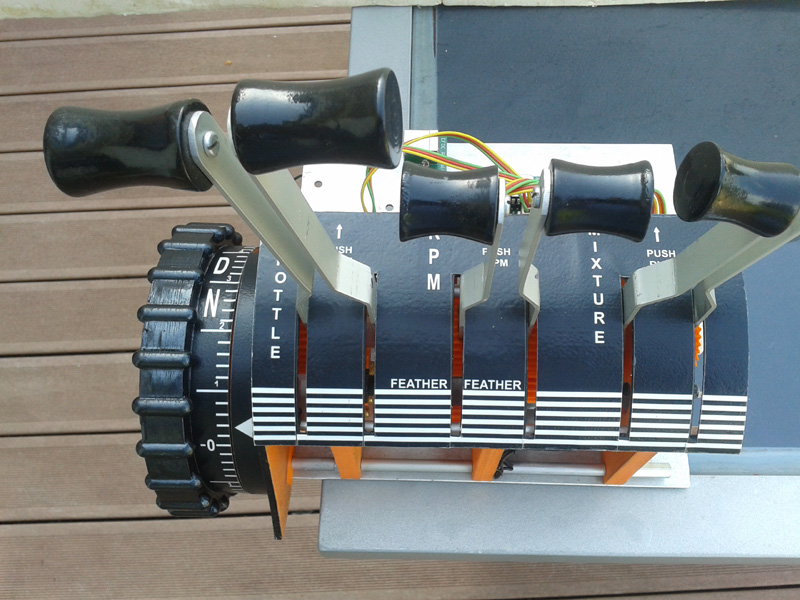
j'ai construit un gyro avec sélecteur de cap (HDG).
La rosace du gyro et la pinule du HDG sont commandées par 2 moteurs PAP (2 stepper).
Je voudrais un fonctionnement identique à celui du cessna de FS.
Voici mon code pour un essai de fonctionnement:
J'utilise IOCP Console pour tester le fonctionnement.
Lorsque je tourne le sélecteur de cap (HDG) la somme "V0001 + V0002" s'affiche, ce qui n'est pas le cas lorsque lorsque la rosace du gyro tourne ( la somme reste fixe), elle se réinitialise que lorsque j'interviens sur le HDG.
Je voudrais que cette somme varie dans les 2 cas.
C'est cette somme qui commande le moteur assujetti à la pinule HDG
Cette somme n'est bien sur le bon algorithme ,mais je ne comprends pas pourquoi les valeurs s'ajoutent dans un cas et pas dans l'autre.
Quelqu'un peut-il m'aider.
Jean-Gilles
j'ai construit un gyro avec sélecteur de cap (HDG).
La rosace du gyro et la pinule du HDG sont commandées par 2 moteurs PAP (2 stepper).
Je voudrais un fonctionnement identique à celui du cessna de FS.
Voici mon code pour un essai de fonctionnement:
- Code: Tout sélectionner
// * FileName : essai_gyrocompas.txt
// * Date : 14/06/2019
Var 0001
Var 0002
Var 0003, name GYRO, Link FSUIPC_INOUT, Offset $2B00, Length 8, Numbers 1
{
V0001 = &GYRO * 10
&MoteurGyro_2 = V0001
}
Var 0004, name HDG, Link FSUIPC_INOUT, Offset $07CC, Length 2
{
V0002 = &HDG * 0.549316
&MoteurHDG_1 = V0001 + V0002
}
Var 0005, name cts_HDG, Link IOCARD_ENCODER, Input 7, Aceleration 1, Type 2 // encodeur de sélection de cap
Var 0006, name MoteurGyro_2, Link USB_STEPPER, Output 2, PosL 3, PosC 0, PosR 4, Type H
Var 0007, name MoteurHDG_1, Link USB_STEPPER, Output 1, PosL 3, PosC 0, PosR 4, Type H
J'utilise IOCP Console pour tester le fonctionnement.
Lorsque je tourne le sélecteur de cap (HDG) la somme "V0001 + V0002" s'affiche, ce qui n'est pas le cas lorsque lorsque la rosace du gyro tourne ( la somme reste fixe), elle se réinitialise que lorsque j'interviens sur le HDG.
Je voudrais que cette somme varie dans les 2 cas.
C'est cette somme qui commande le moteur assujetti à la pinule HDG
Cette somme n'est bien sur le bon algorithme ,mais je ne comprends pas pourquoi les valeurs s'ajoutent dans un cas et pas dans l'autre.
Quelqu'un peut-il m'aider.
Jean-Gilles