Très intéressant !

@silvan_lfab :
Le capteur d’asservissement va informer le circuit électronique de commande du moteur ce qu'il doit faire : avant -arrière - stop
Il existe plusieurs capteurs de positions :
- encodeur
- potentiomètre
- Fourche optique (c'est comme un potentiomètre mais sans le frottement mécanique et l'usure des pistes en carbone)
- Magnétique (effet hall) et depuis peu magnétique angulaire
- Inertiel (tout nos smartphone en ont un)
- jauges de contrainte
Une autre façon de positionner un mobile avec un moteur est de compter les pas d'un moteur pas à pas (ceux qui utilisent une CNC verront de quoi je veut parler

)
La contrainte dans ce cas et de repérer le point zéro qui sera la base de comptage pour les mouvements futurs
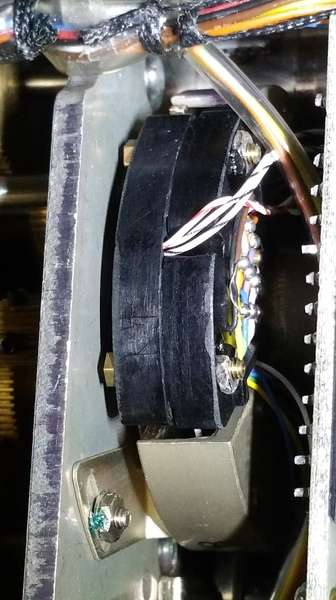
Ici on voit bien la capsule qui se contracte et dilate avec la pression (tout en bas de l'image) :

Je pense voir sur cette photo une fourche optique qui donne l'information de la position de la capsule en bas à droite (ils aiment bien les fourches optique) :

étonnant la quantité de vis


Bon cela confirme le fonctionnement décrit plus haut : Une capsule bouge un axe qui produit une valeur qui est retranscrite par le moteur .... Mais il manque le capteur de position de l'aiguille (l'asservissement) le moteur bouge mais qu'est ce qui indique au moteur qu'il est bien positionné ?
@ patrick : "code Gillham" ah oui que je suis content
encore un truc que j'apprends
 https://fr.wikipedia.org/wiki/Code_Gillham
https://fr.wikipedia.org/wiki/Code_GillhamDonc tu confirmes, le potentiomètre est là pour la correction barométrique ?

 .
.